內容摘要:本文分析和討論了T12型雙鋼輪振動壓路機電液控制系統的組成和工作原理。
關鍵詞:電液控制系統 振動壓路機 比例電磁閥 運算放大器
前民主德國生產的T12型雙鋼輪振動壓路機,由於其功能和噸位上具有的優勢,所以目前在施工中仍然常用。但其相關技術資料目前很少,而且其電路中的許多元器件與國際通用的元器件的外形和表示形式很不相同,這就給使用和維修帶來很多不便。筆者在維修T12型雙鋼輪振動壓路機時,研究和分析了其電液控制系統的工作原理,希望能對有關技術人員有所幫助。
在T12型雙鋼輪振動壓路機中,行駛速度和振動頻率均採用全液壓驅動的電控液壓泵一馬達系統的電液控制系統,包括電氣控制系統和液控驅動系統。該電液控制系統主要用來實現振動壓路機的行駛速度和振動頻率的無級變速控制。在電液控制系統中,由控制電路完成信號的輸人、放大和換向,以驅動比例電磁閥的閥芯等比例地移動和換向,該閥芯控制先導油路使變數泵的斜盤傾角發生變化,從而控制液壓馬達的流量,最後由液壓馬達來驅動行駛和振動系統,使壓路機的行駛速度和振動頻率按要求實現無級變速控制。
1 控制系統組成和工作原理
1.1電氣控制系統的組成和工作原理
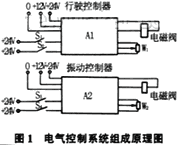
該電氣控制系統由操縱手柄來完成行駛方向。前後輪振動及起停振的選擇。操縱手柄有零位、前進1、前進2、後退l、後退2五個位置。在零位時(S1、S2均不接通),行駛和振動系統均不工作;在前進 1( S1接通)和後退 1( S1接通)位置時,分別執行前進和後退行駛的靜壓工作;在前進2(S2接通)和後退2(S4接通)位置時,分別執行前進帶後輪振動和後退帶前輪振動的振動行駛工作。
行駛速度和振動頻率由電位計W;和外無級調節。 Al為行駛控制器, A。為振動控制器。控制系統組成原理如圖1所示。
1.2電波伺服控制系統組成和工作原理
電液伺服控制系統組成原理如圖2所示。該系統的液壓動力裝置由變數泵和液壓馬達組成,變數泵既是液壓能源,又是主要的控制元件。由於操縱變數泵所需要的力較大,通常採用一個小功率的放大裝置作為變數泵的控制機構。這由比例電磁閥及其控制的先導液壓缸組成的電液位置控制系統完成。
由於行駛電液控制系統與振動電液控制系統的組成和工作原理完全相似,在此僅給出行駛速度電液控制系統組成的原理圖。這是一個電液伺服速度開環控制系統,輸人指令信號由行駛控制器進行放大調節,驅動比例電磁閥的閥芯等比例地移動,該閥芯控制先導油路使變數泵的斜盤傾角發生變化,從而控制液壓馬達的流量,以此來調節液壓馬達的轉速實現壓路機行駛速度的控制。

由於該電液速度伺服控制系統是一個開環控制系統,沒有檢測輸出速度信號進行反饋控制,所以這種系統的缺點是對負載的干擾信號和發動機的轉速變化沒有補償作用。但其優點是結構簡單、成本較低,一般能滿足壓路機的需要。因而在自行式建築機械的速度控制中得到廣泛應用。
2 電氣控制系統工作原理分析
行駛速度控制系統Al和振動頻率控制系統A。具有相似的功能和相同的電路組成,在此僅以行駛速度控制系統為例進行分析。行駛控制系統的電路工作原理圖如圖3所示。
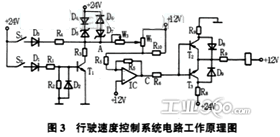
在操縱手柄處於零位置時, S1、 S2均不接通,三極體 T2不導通, B、 C點的電壓均為 12V,三極體TZ、T3均不導通,流過比例電磁閥線圈的電流為零,所以變數泵的輸出為零,液壓馬達不轉動;在操縱手柄處於前進位置時, S1接通、 S2斷開,T2不導通,A點的電位被D4、D5、D6、D7,箝制在 18V,由 W1、W3、R10組成的分壓器使 B點的電壓處在 12- 12. SV範圍中,大於 12V,該電壓值的大小由風來調節;在操縱手柄處於後退位置時, S1斷開、 S2接通, T1導通,這時 A點的電位被宿制在 6V, B點的電位為 11.5V- 12V,小於12V。
運算放大器 IC與 R5和 Rf組成具有電壓負反饋的放大器,B點的電壓為其輸人信號,設為Ui則其輸出電壓:U0=-(Ui-12)Rf/R5+12
可見,當 B點電位高於 12V時(即前進時),U0低於 12V,這時大功率驅動三極體 T2導通、 T3截止,電流從十 12V電源的正極出發,經比例電磁閥線圈、R9、T2、R7,流回電源的負極,比例電磁閥線圈中的電流為正,液壓馬達正向轉動,壓路機前進;當 B點電位低於 12V時(即後退時), U0高於 12V,這時大功率驅動三極體 T3導通、 T2截止,電流從十24V電源的正極出發,經R8、T3、R9、比例電磁閥線圈流入十 12V電源的正極,比例電磁閥線圈中的電流為負,液壓馬達反向轉動,壓路機後退。
壓路機前進和後退行駛的速度由電位器皿無級調節。隊為系統行駛速度靈敏度調節電位器。D8、D9。為續流H極管,用來消除電磁間在斷電時所產生的反向感應電動勢,從而保護大功率三極體的可靠工作。

該控制電路的輸人輸出特性曲線如圖4所示。從圖中可以看出,在零位附近具有「死區」,即在有小電流輸人的情況下,輸出基本保持不變;在「死區」過後,輸出電流上升很快,以後輸出和輸入呈等比例線性關係。這種特性可以改善液壓泵零位及低速的性能,從而具有抗零區干擾和較好的加減速或停振起振性能的特點。