第二章 平面連桿機構
一、定義:
若干構件通過低副(轉動副或移動副)聯接所組成的機構稱作連桿機構。
動副)聯接所組成的機構稱作連桿機構。
連桿機構中各構件的相對運動是平面運動還是空間運動,連桿機構又可以分為平面連桿機構和空間連桿機構。
平面連桿機構是由若干構件用平面低副(轉動副和移動副)聯接而成的平面機構,用以實現運動的傳遞、變換和傳送動力。
§2.1平面四桿機構的類型及應用
2.1平面四桿機構的類型及應用
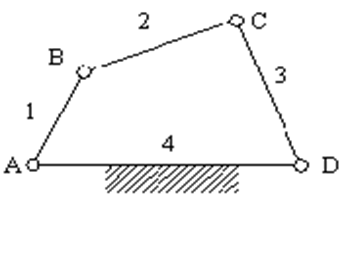
在此機構中,AD固定不動,稱為機架;AB、CD兩構件與機架組成轉動副,稱為連架桿;BC稱為連桿。在連架桿中,能作整周迴轉的構件稱為曲柄,而只能在一定角度範圍內擺動的構件稱為搖桿。
一、鉸鏈四桿機構基本類型
根據機構中有無曲柄和有幾個曲柄,鉸鏈四桿機構又有三種基本形式:
1.曲柄搖桿機構
:兩連架桿中一個為曲柄而另一個為搖桿的機構。
雷達調整機構
縫紉機踏板機構
當曲柄為原動件時,可將曲柄的連續轉動轉變為搖桿的往複擺動,如圖中的雷達天線機構;反之,當搖桿為原動件時,可將搖桿的往複擺動轉變為曲柄的整周轉動,如圖所示的縫紉機踏板。
2.雙曲柄機構
:兩連架桿均為曲柄的四桿機構。
可將原動曲柄的等速轉動轉換成從動曲柄的等速或變速轉動,如圖所示的慣性篩驅動機構;
構的相對兩桿平行且相等時,則成為平行四邊形機構,如圖所示。
注意:平行四邊形機構在運動過程中,當兩曲柄與機架共線時,在原動件轉向不變、轉速恆定的條件下,從動曲柄會出現運動不確定現象。
可以在機構中添加飛輪或使用兩組相同機構錯位排列。
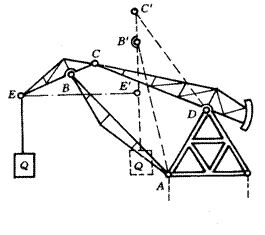
3.雙搖桿機構
.雙搖桿機構
:兩連架桿都是搖桿的機構,如圖所示的鶴式起重機構,保證貨物水平移動。
二、機構的演化
機構的演化方法有三種:
1)通過改變構件的形狀和相對尺寸進行演化,如圖2—8的演化;
2)通過改變運動副尺寸進行演化;
3)通過選用不同構件作為機架進行演化。
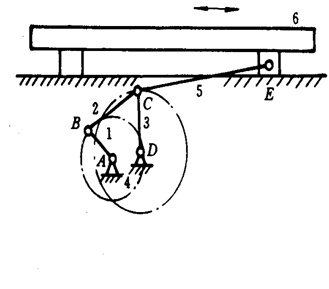
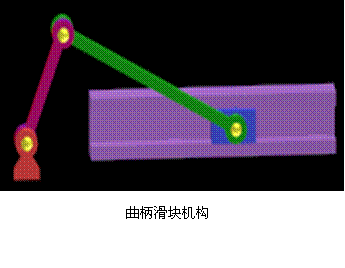
1.滑塊機構
如圖所示,當構件1能整周迴轉成為曲柄時,該機構稱為曲柄滑塊機構;否則該機構稱為擺桿滑塊機構。
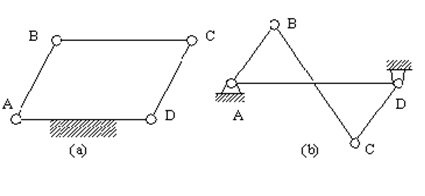
2.導桿機構
在圖a所示的對心曲柄滑塊機構中,若改取構件1為機架,則機構演化為導桿機構。圖b。
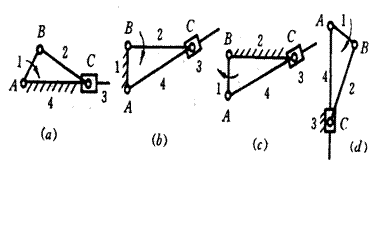
3.曲柄搖塊與曲柄轉塊機構
.曲柄搖塊與曲柄轉塊機構
在圖a中若改取構件2為機架,當l1< l2時,隨構件1的轉動,滑塊3只在一定角度範圍內擺動,該構件稱為曲柄搖塊機構;當
l1> l2時,則滑塊3可作整周轉動,我們稱為曲柄轉塊機構。
4.移動導桿機構
.移動導桿機構
在圖a中,如取滑塊3為機架,則該機構演化成移動導桿機構
§2.3四桿機構特性
四桿機構特性 一、四桿機構存在曲柄的條件
鉸鏈四桿機構的三種基本型式的區別在於它的連架桿是否為曲柄。而且一般原動件為曲柄。
。 而在四桿機構中是否存在曲柄,取決於機構中各構件間的相對尺寸關係。
設a’和AB”。
由圖可見,為使AB桿能轉至位置AB’,各桿長度應滿足:
a+d ≤ b+c ①
而為使AB桿能轉至AB”,各桿長度關係應滿足b ≤ (d-a)+c c ≤ (d-a)+b
可得: a+b ≤ d+c ②
a+c ≤d+b ③
由①②③可以得出鉸鏈四桿機構曲柄存在條件為:
1)連架桿和機架中必有一桿是最短桿;
2)最短桿與最長桿長度之和小於或等於其它兩桿長度之和。(稱為桿長條件)
上述兩個條件必須同時滿足,否則機構不存在曲柄。
。 二、急回特性和行程速比係數
1) 當主動件曲柄等速轉動時,從動件搖桿擺回的平均速度大於擺出的平均速度,搖桿的這種運動特性稱為急回特性
2)行程速比係數K
K=v2/v1=(180°+θ)/(180° -θ)
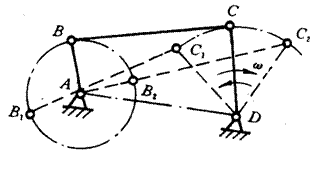
當機構存在極位夾角θ時,機構便具有急回運動特性。且θ角越大,K值越大,機構的急回性質也越顯著
牛頭刨床機構
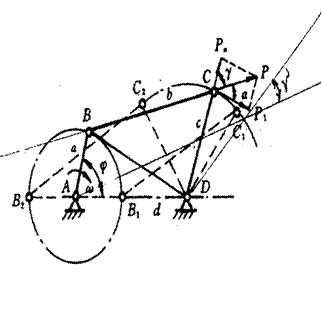
三、壓力角與傳動角
連桿BC與從動件CD之間所夾的銳角γ 稱為四桿機構在此位置的傳動角。顯然γ越大,有效分力Pt越大,Pn越小,對機構的傳動就越有利。所以,在連桿機構中也常用傳動角的大小及變化情況來描述機構傳動性能的優劣。為了保證機構傳力性能良好,應使γmin≥ 40 ~ 50°
最小傳動角的確定: 對於曲柄搖桿機構, γmin出現在主動件曲柄與機架共線的兩位置之一。
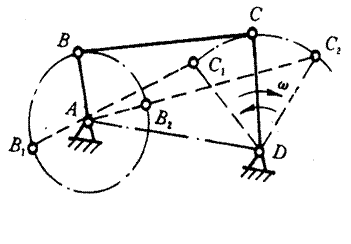
三、死點
如圖:當以搖桿CD為主動件,則當連桿與從動件曲柄共線時,機構的傳動角γ= 0°, 這時主動件CD通過連桿作用於從動件
AB上的力恰好通過其迴轉中心,出現了不能使構件AB轉動的“頂死”現象,機構的這種位置稱為“死點”。
上的力恰好通過其迴轉中心,出現了不能使構件AB轉動的“頂死”現象,機構的這種位置稱為“死點”。
在工程上,為了使機構能夠順利通過死點而正常運轉,必須採用適當的措施,如發動機上安裝飛輪加大慣性力,或利用機構的組合錯開死點位置,例如機車車輪的聯動裝置。
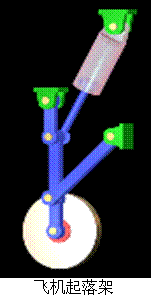
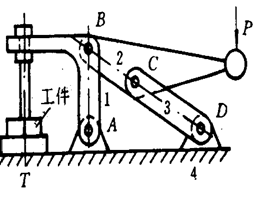
但是,也應注意到,在工程上也長有利用死點來實現一定工作要求的,例如飛機起落架、各類夾具中,如下圖
§2.4四桿機構設計
2.4四桿機構設計 連桿機構的設計方法有
:作圖法、實驗法及解析法。圖解法和實驗法比較直觀易懂,但設計精度要低。解析法精度高,但計算要複雜,有時利用手工幾乎無法完成。
一、按連桿預定位置設計四桿機構
二、按給行程速比係數K
K 設計四桿機構
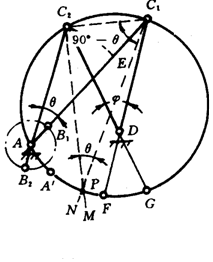
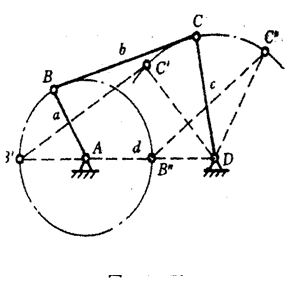
如圖2-21所示,已知搖桿CD長度及擺角,行程速比係數K。
要求設計曲柄搖桿機構。步驟如下:
1)由公式,求出極位夾角θ。
2)任選固定鉸D的位置,並作出搖桿兩極限位置C1D和C2D,夾角為。
3)連接C1C2,作∠C1C2O=∠C2C1O= 90˚-θ,得交點O,以O為圓心,OC1為半徑作圓。
4)在圓上任取一點A為固定鉸。
5)連接AC1、 AC2,則AC1、 AC2分別為曲柄與連桿重迭拉直共線位置,即:
AC1=BC-AB AC2=BC+AB
可分別求得AB與BC